
【sevensixTV】に第80弾の動画を更新しました。
00:54 今日の3Dデータ
02:48 RANSAC
04:06 ゴルフボールでやってみた
04:51 まとめ
本製品は長物、光沢物、複雑形状のワークに対して高精度な寸法検査が可能な装置です。
2つのコア技術により検査自動化を推進します。
①キャリブレーション
②自動検査アルゴリズム
本動画では点群データをロバストに検査するためのアルゴリズムの一例を計測データを交え紹介します。
※本動画に出てくる”従来法”とは最小二乗法です。
*ロバスト性とは? 外乱の影響によって変化することを阻止する仕組みのこと。
詳しくはこちらの動画『3D検査』自動化アルゴリズム開発│Vol.52
++++(動画内より一部抜粋)+++++
セブンシックスは現在3次元検査装置 『Spector』を開発しています。
今回は、この検査装置にも取り入れられているデータのロバストな検査法についてご紹介します。検査装置は、治具の違いや外部環境によらず、正確な検査を行えることが必要と考え、セブンシックスではハードウェアだけでなく、ソフトウェアでもロバスト性の高い製品を開発しています。
00:54 今日の3Dデータ
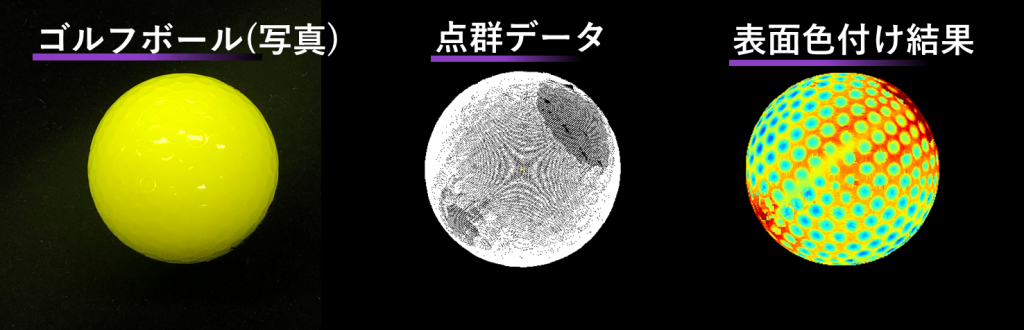
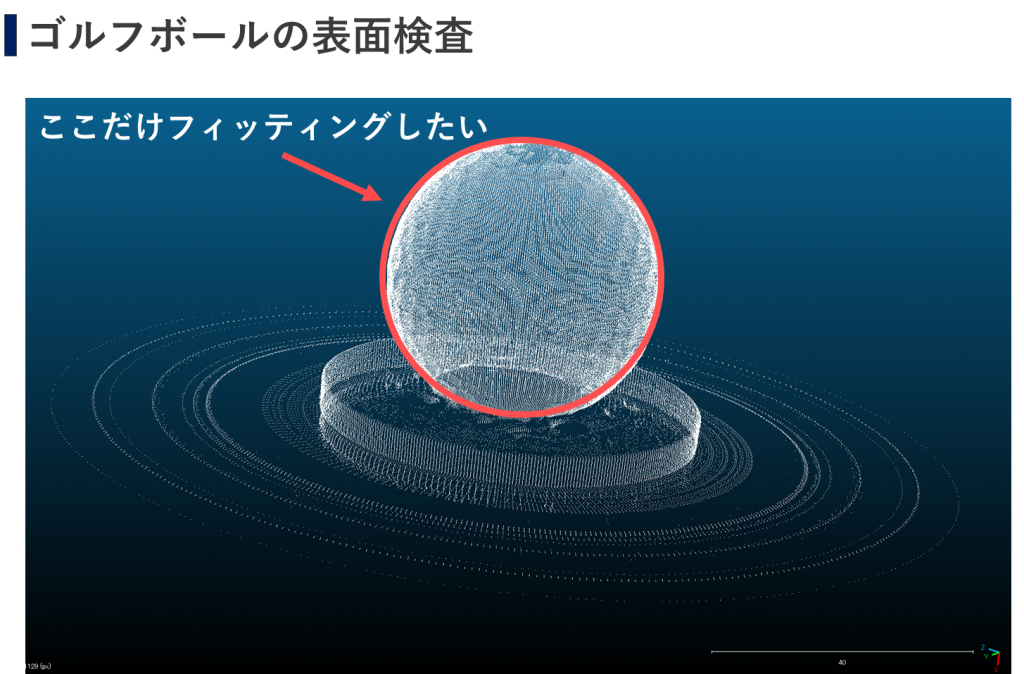
こちらは、『3D検査』球体の検査例│Vol.71 でもご紹介したゴルフボールの3Dスキャンデータになります。
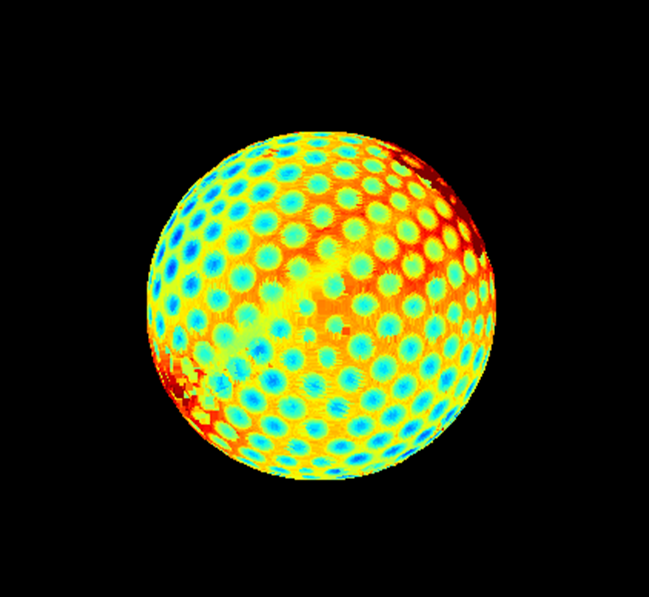
色付けした右の画像は、左のゴルフボールの表面状態を色で可視化しており、ボール表面の状態がよくわかります。
中央の点群データに適切に球面をフィッティングすることで、出力されるデータです。このように処理することで、ゴルフボールの表面の状態を確認し傷などがないか検査を行うことが出来るようになります。
今回はゴルフボールの検査を行う為に、球面をロバストにフィッティングする方法を紹介します。
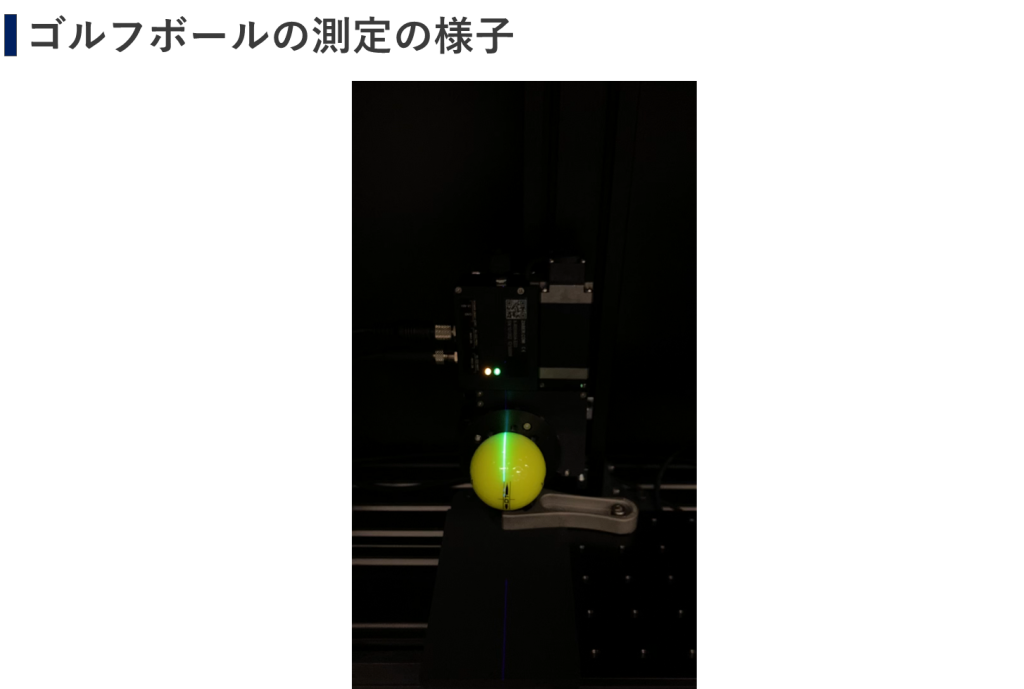
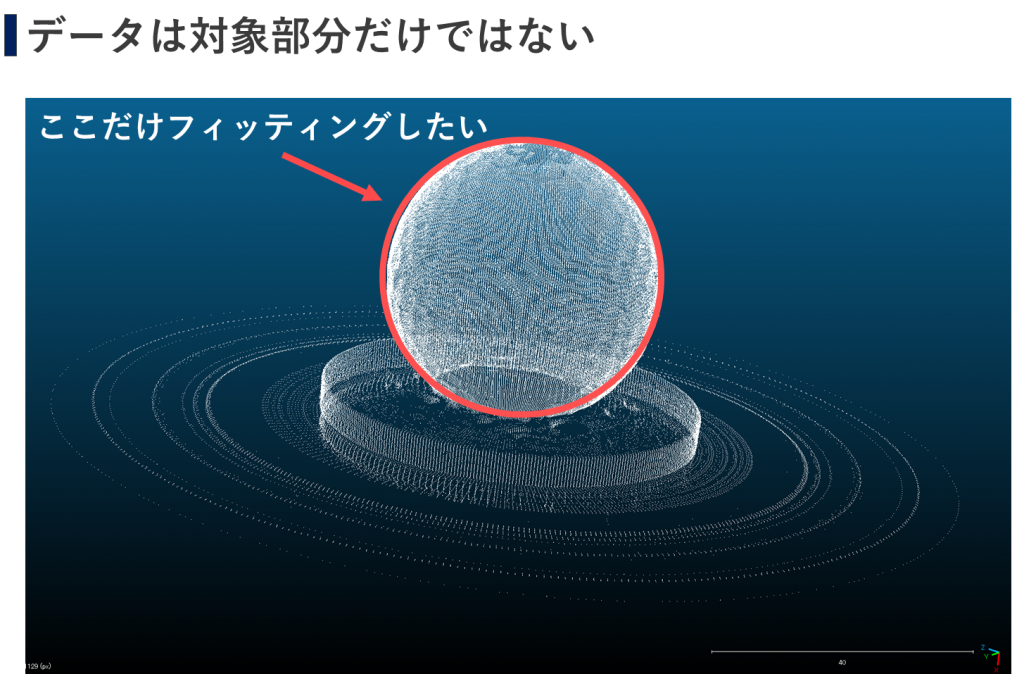
下記の図は、3次元計測装置でゴルフボールの計測をしているときの様子です。3次元計測装置は、ボール表面のXYZ座標の3次元のデータを点群として出力します。
取得したデータを何も加工しない状態で3Dプロットソフトに入れてみると、下記のような感じで出力されます。
こちらで見ると、ボールだけでなく、ボールを固定していた治具も一緒に写っています。
これに対して、ボールに球面をフィッティングし先ほどのように色付けをしたいのですが、治具が邪魔しています。
治具部分のデータは予め除外するようにプログラムで設定しても良いですが、治具を変更したりする時など条件が変わる度に設定し直すのは現実的ではありません。そこで、治具ごとゴルフボールのフィッティングを行いたいと思います。
02:48 RANSAC
今回はRANSACとよばれるアルゴリズムを紹介します。これは母集団からランダムに点を選んでモデルを作成し、
指定した閾値より大きな外れ値を除外して最小二乗法を行い、これを繰り返すことで最適なパラメータを探索する
アルゴリズムです。
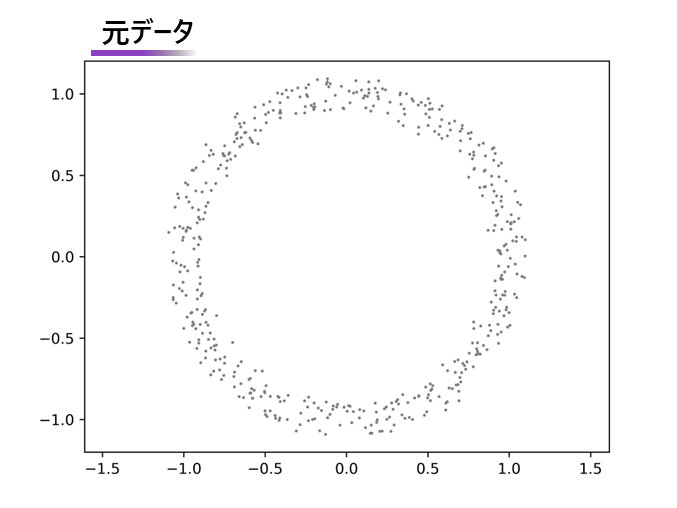
例えば、こんな2次元の円状の点群があったとしましょう。
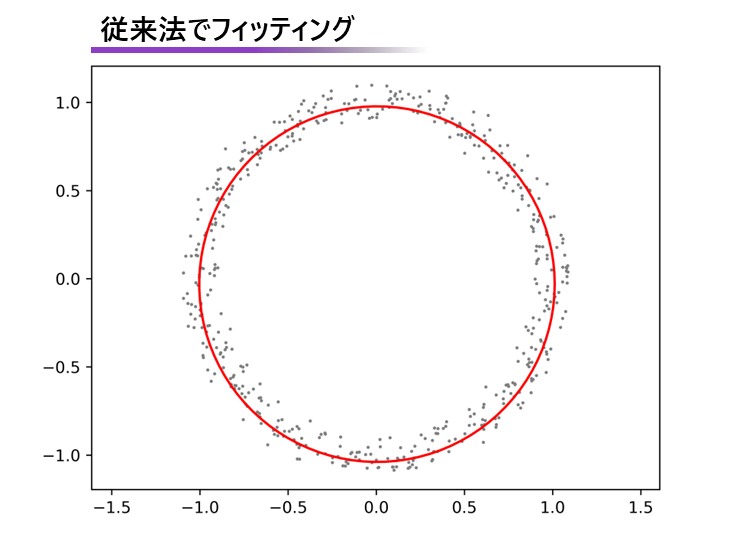
こちらに、一般的なフィッティング手法である最小二乗法で円をフィッティングします。
従来法で各点の距離の二乗和が最小となる円を描いてみました。 うまくフィッティングできているように見えます。
では、これはどうでしょうか。
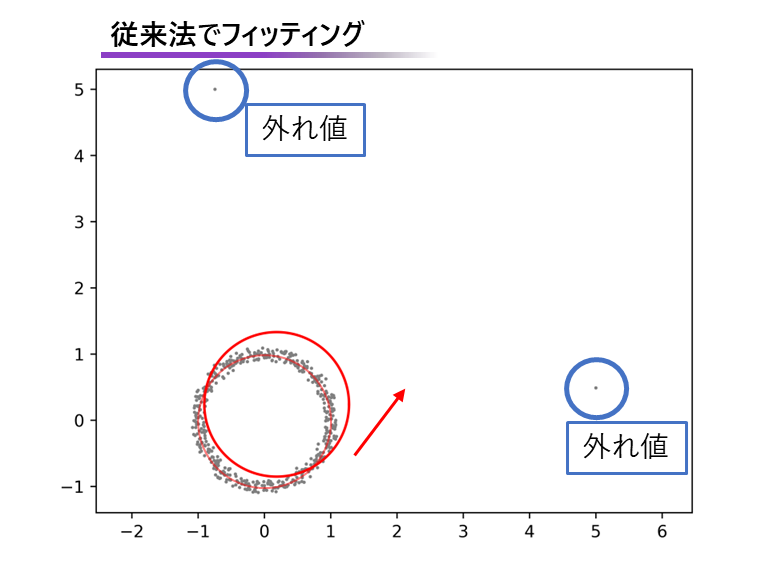
大きな外れ値を2点用意したところ、従来法では円が右上にずれてしまいました。
これは外れ値も含めているため、引っ張られているのが原因です。
従来法は単体では外れ値に弱く、外れ値を除去する前処理を適切に行う必要があります。
これに対して、同じデータにRANSACを適用するとこのようになります。
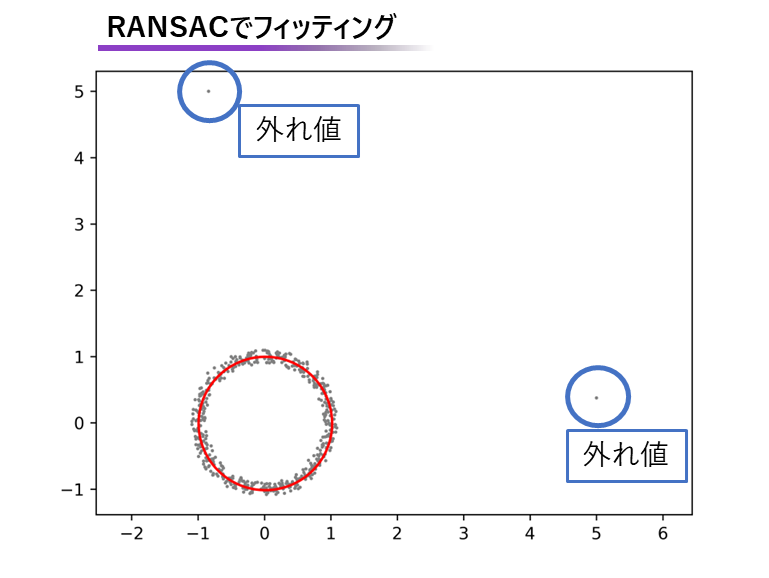
RANSACによって外れ値が除外され、うまくフィッティングを行うことができました。
04:06 ゴルフボールでやってみた
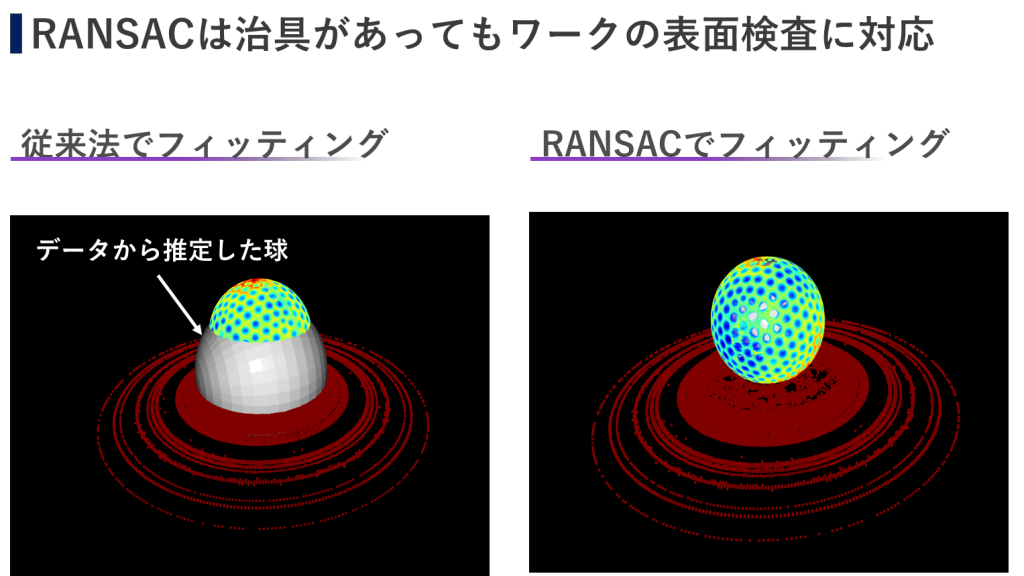
下のステージは、フィッティングしたいゴルフボールのデータから見れば外れ値であり、従来法だけでは解決できません。
従来法とRANSACを用いて行った結果がこちらになります従来法とRANSACを用いて行った結果がこちらになります。
この白い球は、点群から推定した球であり、従来法のみを用いた左の図は、ゴルフボールにうまくフィッティング出来ていないことがわかります。
一方で、RANSACを適用した右図の結果では、ゴルフボールにうまくフィッティング出来ており、白い球がゴルフボールの中心部分にあります。
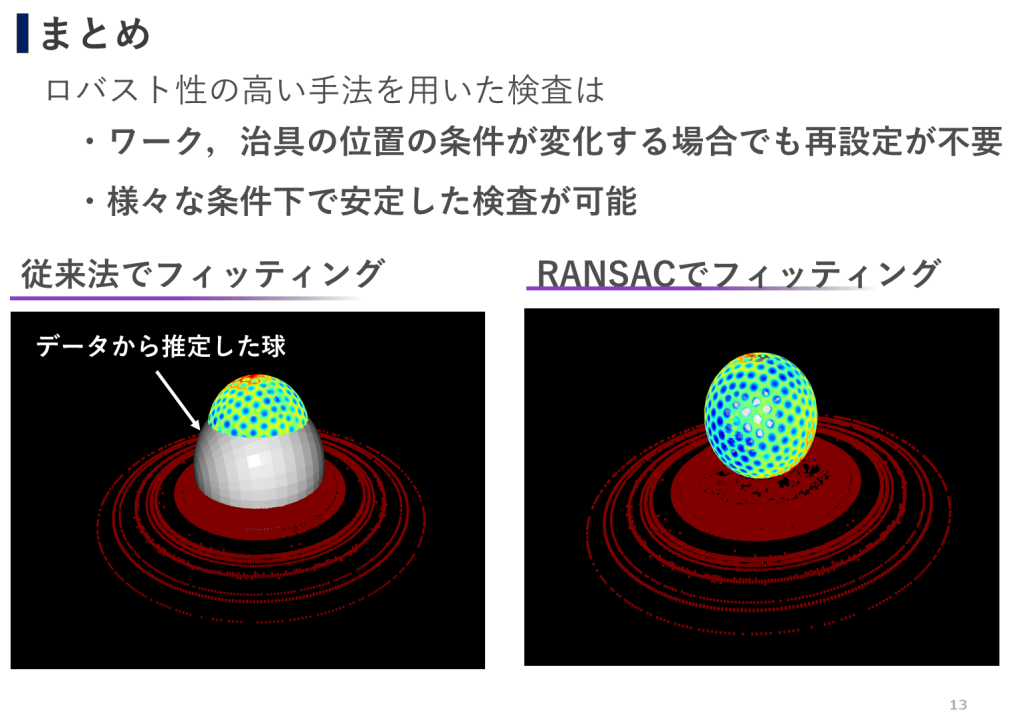
04:51 まとめ
治具部分のデータを除外し、ゴルフボールの表面を推定できていることが確認できると思います。
RANSACを用いることで、ワークや治具の位置などの条件が多少変動しても、設定をやり直すことなく検査することが可能です。ロバスト性の高い方法を用いることで、多品種、様々な条件下で安定した検査を行えます。
++++++++++++++++++++
====================