
目次
本記事でわかること
本記事では、LiDAR(Light Detection and Ranging)の基本原理と仕組みをわかりやすく解説します。
LiDARは対象物にレーザー光を照射し、反射光の往復時間から距離を計測するセンシング技術で、自動運転やロボット、自立走行システムなどで活用されています。ToF法やFMCW法といった計測手法や、LiDARの基本構成要素(光源・受光素子など)、従来のセンシング技術との違いもご紹介しています。
また、スマートフォンや衛星高度計、大気観測など、さまざまな応用例についても解説しており、LiDAR技術の全体像を把握できる内容です。
本コラムをPDF資料として読みたい方はこちら
LiDARとは?
近年、自動車の自動運転、ロボットの自立走行などの技術が注目されています。従来はカメラやレーダによる物体認識等が主流でしたが、第三の目として期待されているのが、今回ご紹介するLiDAR (Light Detection and Ranging) です。
LiDARは対象物にレーザー光を照射し、光が往復する時間から距離を算出するセンシング技術の一つです。簡単な計測方法に加え、その分解能が高いことから自動車だけでなくゴルフの小型距離計測機など、様々な場面で位置、距離、形状計測への応用が期待されています。
LiDARの仕組みと原理
LiDARの仕組み
前述にもある通り、LiDARは対象物にレーザー光を照射し、反射した光の情報から距離を算出します(図1)。距離計測手法の。中でも計測原理は簡単なため、センササイズを小さくすることができ、設置場所などに幅を持たせることができます。LiDARは2Dと3Dの2種類が存在します。
3DLiDARでは複数のカメラを使用して計測していた従来方法に対して、1つのセンサでより精密なセンシングを実現しました。3DLiDARは全方位の距離情報を点の集まりとして収集することで障害物の位置や形状をより正確に計測することが可能です。
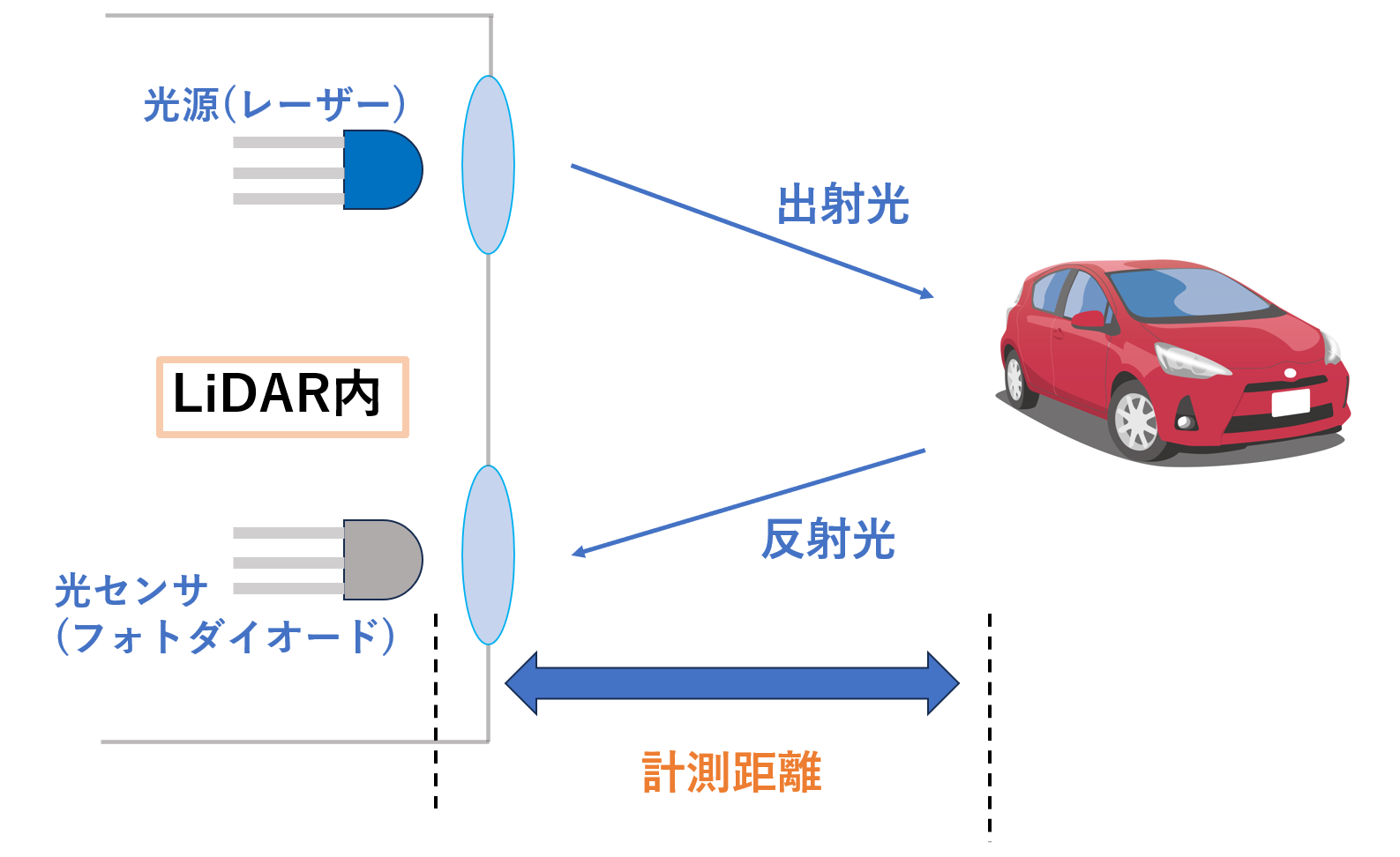
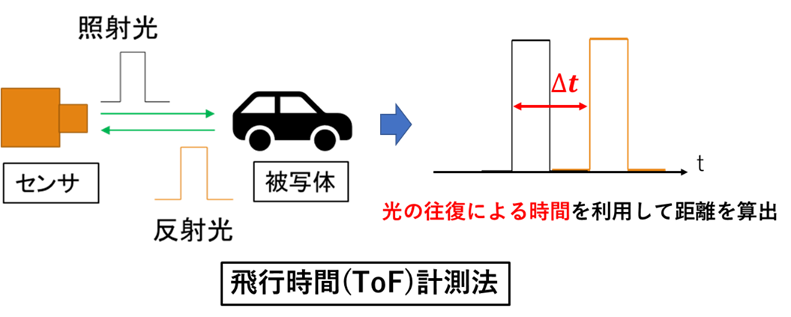
図1 ToF法を利用したLiDARでの距離計測の仕組み
LiDARの構成
LiDARは主にレーザー光などの光源、受光するためのフォトダイオード、時間を計測するための制御回路の3つで構成されています(図2)。受光素子であるフォトダイオードは *1 MPPCや *2 APD、PINフォトダイオードなどがありそれぞれの受光素子によって適切な測定距離や読み出し回路、その他環境条件などが異なるためそれぞれ利用したい環境によって適切なデバイスを選択することが重要です。また光源にはレーザーダイオードを使用しており、従来のミリ波やカメラを用いた計測手法よりもより精度の高い計測が可能となります。
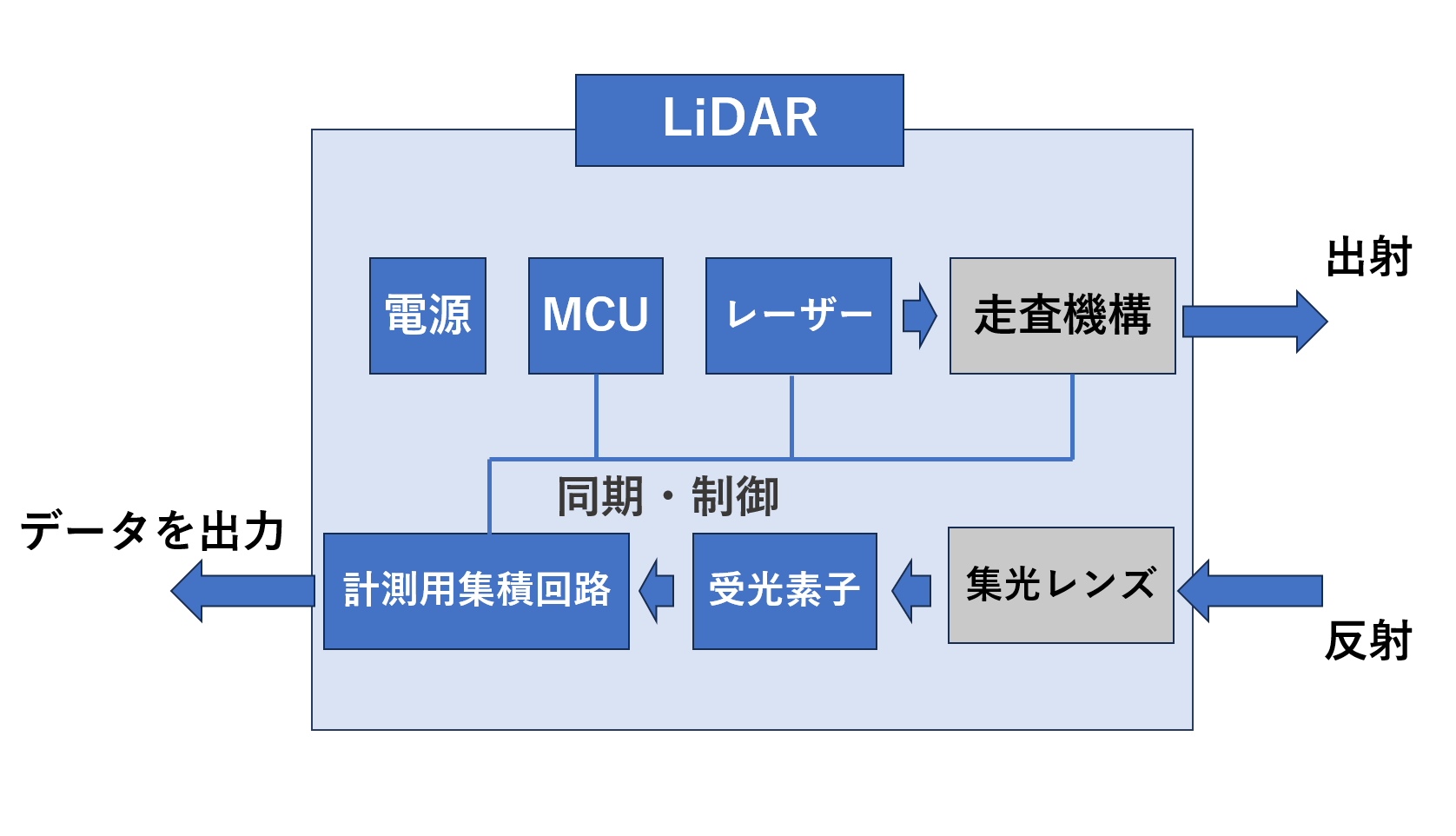
図2 LiDARの構成
LiDARと従来方法との比較
LiDARという技術が活用される前、一般的にはミリ波と呼ばれる電磁波を用いたレーダが使用されていました。しかしレーダでは対象物までの距離がわかってもその対象物の詳細な形状までは捉えることができず、カメラを使用することで情報を補っていました。
しかしカメラは物体が自然光を反射した光を収集するため、夜間などの暗い場所では計測精度が落ちてしまうという課題がありました。これらの手法では、環境による検出精度の影響を受けないことが強みとしてありますが、距離の分解能が数センチ程度になってしまい、更なるセンシング技術の発展に伴う需要には応えられていません。
そこで開発されたLiDARでは光源にレーザー光を使用することで高出力かつビームサイズが小さいことから遠距離を高精度で計測することを可能にしました。特に3DLiDARでは今まで実現が難しかった3Dの情報を正確に取得することができ、対象物や周囲の環境を瞬時に把握することに長けています。距離の分解能は約60ミクロンを実現しており、自動運転だけでなく様々な分野で高精度な距離計測での活用が期待されています。
ミリ波レーダとLiDARの比較表
| 計測法 | 計測精度 | 環境条件 | その他特徴 | |
| ミリ波レーダ | 電磁波を照射し、跳ね返りの時間から計測 | ・物体までの位置を計測 ・物体の位置や形状を正確に把握することは難しい | ・夜間や悪天候でも一定の性能は保てる | ・導入コストが比較的低い |
| LiDAR | レーザー光を照射し、跳ね返りの時間から計測 | ・3次元での物体認識が可能 ・高精度で人や障害物を検知 | ・夜間や悪天候でも高精度での計測が可能 | ・自動運転に向けて期待されている |
また近年では一般的に使用されている周波数帯域 (900nm周辺) では人の目に優しくないといった課題から、周波数帯域を1550nmにすることで目に優しいだけでなく、ファイバレーザー技術を用いたさらなる高出力化やビームの安定化が期待できます。
当社のYouTubeチャンネルにおいてLiDAR用のレーザー光源の紹介をしております。ぜひご覧ください。
LiDARの計測手法
LiDARの内部に搭載されている距離計測システムには主に2種類があります。以下でその計測手法と特徴について説明します。
ToF法
ToF (Time of Flight) 法では、光源から出射された光が対象物に反射し、光検出器で測定されるまでの時間 ∆𝑡 や位相の変化量 ∆𝜑 を測定することで、対象物との距離を算出する手法です。
装置は光源と光検出器のみで計測ができ、演算処理も簡素であるためリアルタイムで簡単に計測を行うことが可能となります。
ToF法において測定レンジは、用いる光のパワーや対象物の光吸収性、検出器の検出レンジ、検出する際の光の反射角度などに影響されてしまいます。このような要因で光の反射が弱いと、光を検出できず計測不可になることや、強すぎると検出器から出力される信号が飽和してしまい計測精度が落ちてしまうといった弱みもあります。
FMCW法
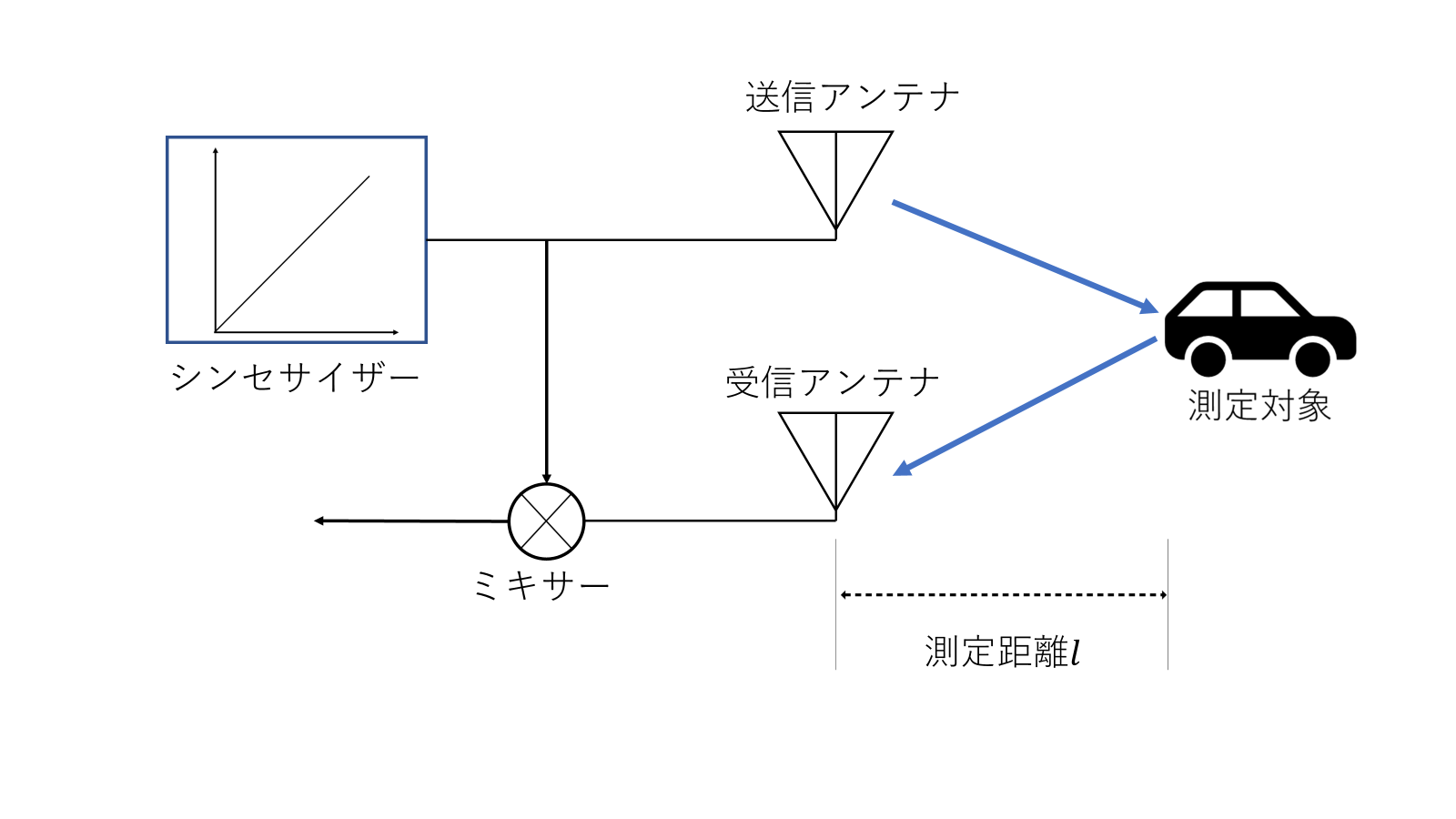
FWCM法では、周波数変調された連続波 (Frequency Modulated Continuous Wave) を用いて距離計測を行う計測手法です。地中レーダや航空機、衛星の高度計などに一般的に用いられますが、近年では集積回路の技術向上により雲などの気象観測レーダにも用いられています。本手法の特徴として、距離計測に加えて、移動物体の距離、速度計測、および角度検出をすることができます。
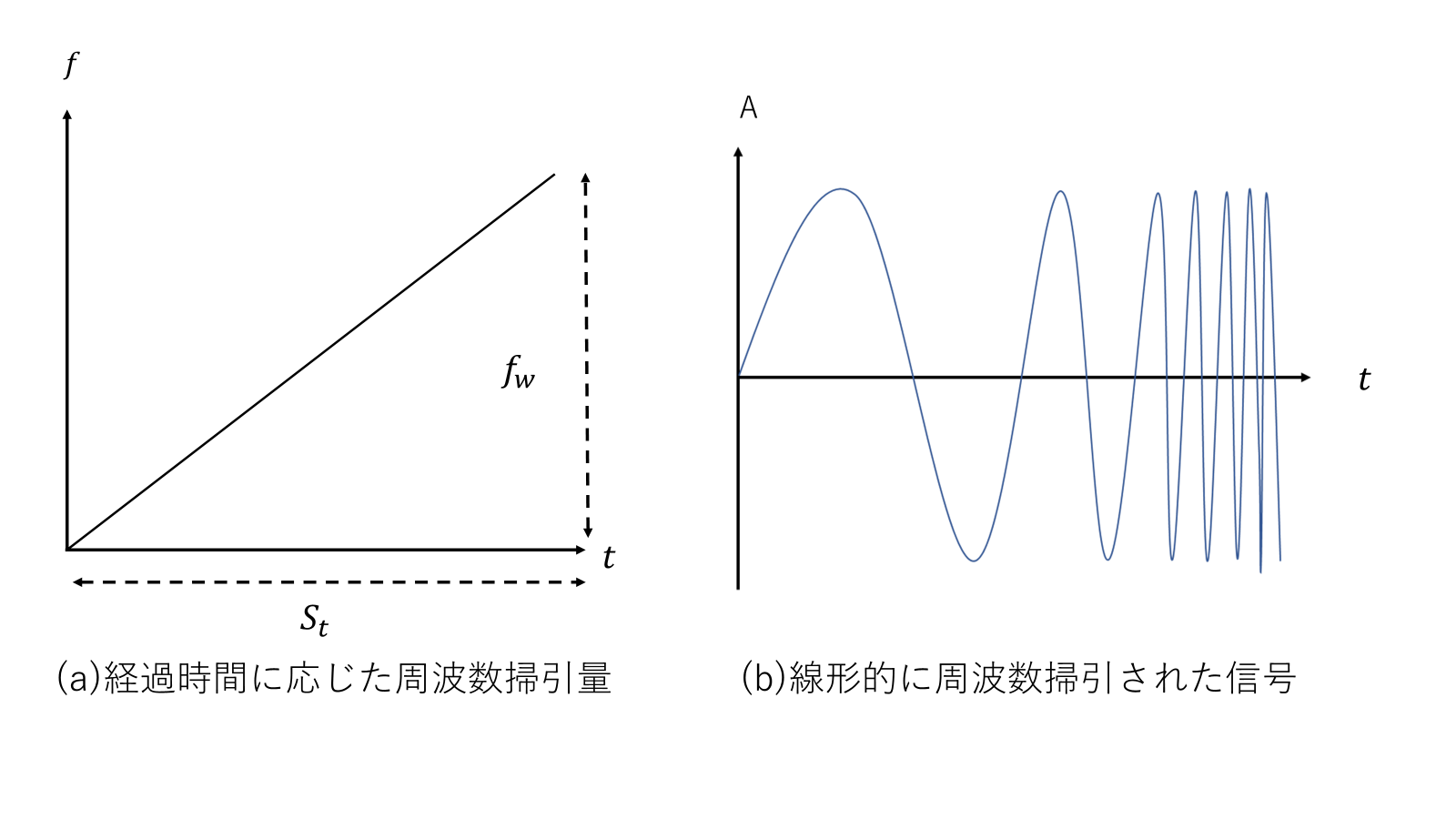
FMCW法では、チャープという時間経過に応じて線形的に周波数掃引される信号を用います。
以下にチャープの一例をお見せします。
FMCW法での距離計測は、測定対象に照射して反射された信号と、送信の信号をミキシングすることで、*3 ビート 信号 (IF信号) を得ます。ビート信号周波数は掃引周波数幅と掃引時間により、測定対象までの距離に応じた周波数信号になるため、*4 FFT 処理を施すことによって距離が求めることができます。
FMCW法はLiDARのほかにミリ波レーダでも採用されており、様々な分野での活躍がToF法同様に期待されています。
主な使用シーン
これまでLiDARの仕組みや計測原理などについてご紹介しましたが、実際にLiDARがどのような場面で活用されているのかを紹介します。
自動運転、自動走行ロボット
自動運転技術を搭載した自動車の普及により知名度が上がりましたが、自動車のほかにも自動走行を行うロボット等にも搭載されています。このロボットは施設内の清掃、物を運搬する際に活躍します。これらに共通するのが自己位置推定という技術です。自己位置推定とは周囲の情報から自分が部屋のどこに位置するのかを推測するという技術のことです。周囲の情報をできるだけ広範囲で正確に取得する必要があるため、LiDARとの相性が良く、多くのデバイスでこの組み合わせが採用されています。
衛星・航空機の高度計
LiDARではその特性から沿岸の変動の観測、高度計として標高などの情報を収集することができます。これらの応用例では特定の範囲の情報を遠距離から測定する特徴があります。GPSを用いた自己位置推定と組み合わせて使用することで広範囲で正確な変動の様子や、地形のマッピングなどが可能になります。
スマートフォン
私たちの使用するスマートフォンにもLiDARは使用されています。LiDARの特徴でもある小型で計測原理が簡易である点を最大限に発揮した応用例です。iPhoneなどに搭載されているFace IDでは3Dの点群データにより使用者の顔の特徴を細かくとらえることで誤認識を防ぎながら楽にロックを解除することができます。従来のパスワードでのロックと比較しハンズフリーでミスが起こりにくい点で、他の施設やデバイス等の活用にも期待されています。
欠かせないキーデバイス
LiDARは上記でもご紹介した通り、複数のデバイスによって構成されています。その中でも特に重要なキーデバイスとなるのが光源であるレーザーと受光素子であるフォトダイオード(PD)なります。以下ではそれぞれのデバイスについてご紹介いたします。またこのようなデバイスは用途に合わせて選ぶ必要があるので、その際の参考にもご使用ください。
レーザー(光源)
レーザーはLiDARにおいて最も重要なデバイスです。基本的にLiDARで使用される光源は主に帯域の広い白色光源、帯域の狭い単色光源の2つです。単色光源は白色光源に比べて計測距離が長く、分解能がいいため計測精度が求められる場面で活躍するのに対し、白色光源は導入コストが安く済むことや複数種類の波長でスキャン等ができるのが特徴です。そのため使用用途や計測対象に合わせて光源を選定する必要があります。またそれぞれの光源によって出力パワーや波長帯域、中心波長などの各種特性が異なるためそれぞれのパラメータにも注目することでデバイス不一致などのトラブルを避けることができます。
当社ではメインサプライヤーであるBWT社の低価格、高出力LDやLiDAR向けのファイバレーザー用の励起光源などLiDARで使用可能な光源を取り扱っています。
▼ 詳しくはこちらの製品ラインナップをご覧ください。

フォトダイオード(PD)
PDもLiDARをはじめとする計測機器には欠かせないデバイスの1つです。
どれだけ場面に応じた光源やそのた機器を用いても受光機器であるPDの性能が不足、不一致の場合、要求通りの計測を行えません。基本的にPDは使用する光源の特性に合わせてセットで選ぶのが一般的です。
またPDにも分光感度や応答速度、暗電流などのパラメータによって性能、価格帯は様々です。こちらも用途、光源にあったPDを選ぶようにしましょう。
PDに関しても当社では様々な種類の製品を扱っておりますので、ぜひご覧ください。
https://www.sevensix.co.jp/products-category/pd/
今後期待される用途やシーン
大気観測
これまでには空から地表面などを観測していましたが、今後は大気の雲形成の様子やエアロゾルなどの観測にも応用するための研究が進められています。エアロゾルや雲の形成の様子を地上または衛星を用いて観測することで地球温暖化や気候変動などの予測を更に高精度で行うことが可能となり、今後の環境問題と向き合うために重要な技術となります。計測方法は地上から光を照射し、大気中などでの散乱などの様子を戻り光から取得します。
地殻変動の観測
LiDARを海中に照射することで海底の地殻変動などの観測にも応用が期待されています。海底の情報を収集することで地震や噴火などの自然災害の予兆となるような情報を得ることができます。現在は電子基準点を用いたGNSS連続観測などが用いられていますが、その精度や観測のために基準を満たす海域に赴く必要があります。ここでLiDARを用いた計測を行うことで高精度の計測を3次元で広範囲に行うことが可能になり、既存手法と組み合わせることでさらに高精度な計測の実現が期待されています。
まとめ
- ● LiDARとは対象物にレーザー光を照射し、光が往復する時間から距離を算出するセンシング技術の一つです。
- ● LiDARは2Dと3Dの2種類が存在し、特に3DLiDARでは複数のカメラなどを使用して計測していた従来の方法に対して1つのセンサでより精密なセンシングを実現しています。
- ● LiDARの内部に搭載されている距離計測システムには主に2種類あり、その計測法によって計測範囲や分解能などが決まり、速度計測ができるものもあります。
- ● LiDARは主にスマートフォンや自動運転自動車などの周囲の障害物認識だけでなく、大気や地殻などの計測など様々な分野で活躍しています。
用語集
| *1 MPPC | MPPC (Multi-Pixel Photon Counter) は、SiPM (Silicon Photomultiplier) と呼ばれるデバイスで、主に光子量を計測するために使用されます。 |
| *2 APD、PINフォトダイオード | これらはフォトダイオードの一種で、光信号を電気信号に変換するための重要な役割を果たします。それぞれが異なる特性を持つため、使用に合わせたデバイス選びが必要になります。 |
| *3 ビート信号 | 周波数の異なる光などを干渉させたときに発生する信号のことを言います。この信号の周波数は干渉させた2つの周波数の差分になります。うなりとも呼ばれます。 |
| *4 FFT | FFT (Fast Fourier Transform) は、離散フーリエ変換 (Discrete Fourier Transform, DFT) を計算機上で高速に計算するためのアルゴリズムです。 |
| *5 MCU | MCU (Microcontroller) は、CPUに加えてRAM、ROM、I/Oポートなどの半導体メモリ、記憶素子、端子などを1つの集積回路 (IC) にまとめた、いわば極小のコンピュータです。 主に機器の制御に使われます。 |